
”cartographer 激光SLAM loam lio gmapping“ 的搜索结果

任务动机:梳理cartographer处理激光雷达运动畸变的原理,并针对特殊数据特性的雷达数据做相应适配,进而提升建图效果。 任务描述:查阅cartographer源码中激光雷达运动畸变的处理流程,对比分析实际使用中特定激光...
Cartographer激光里程计是一个用于建立环境地图和定位机器人的开源软件包。它是基于激光雷达数据进行建图和定位的。 在Cartographer中,激光里程计的实现涉及多个文件和类。其中,入口文件是`node_main.cc`,它包含...
传感器数据处理1、激光数据处理1.1 原始点云处理1.2 点云去畸变1.3 滤波 1、激光数据处理 1.1 原始点云处理 1.2 点云去畸变 首先, 获取该帧第一个激光点的时间戳, // 得到第一个点的时间戳 const common::Time time...
cartographer 代码思想解读(9)- 激光雷达畸变矫正 本节为cartographer前端匹配算法中最后一个核心算法实现内容,下节将会这9节内容串起来构成cartographer中2dslam的前端总体接口local_trajectory_builder_2d类。...
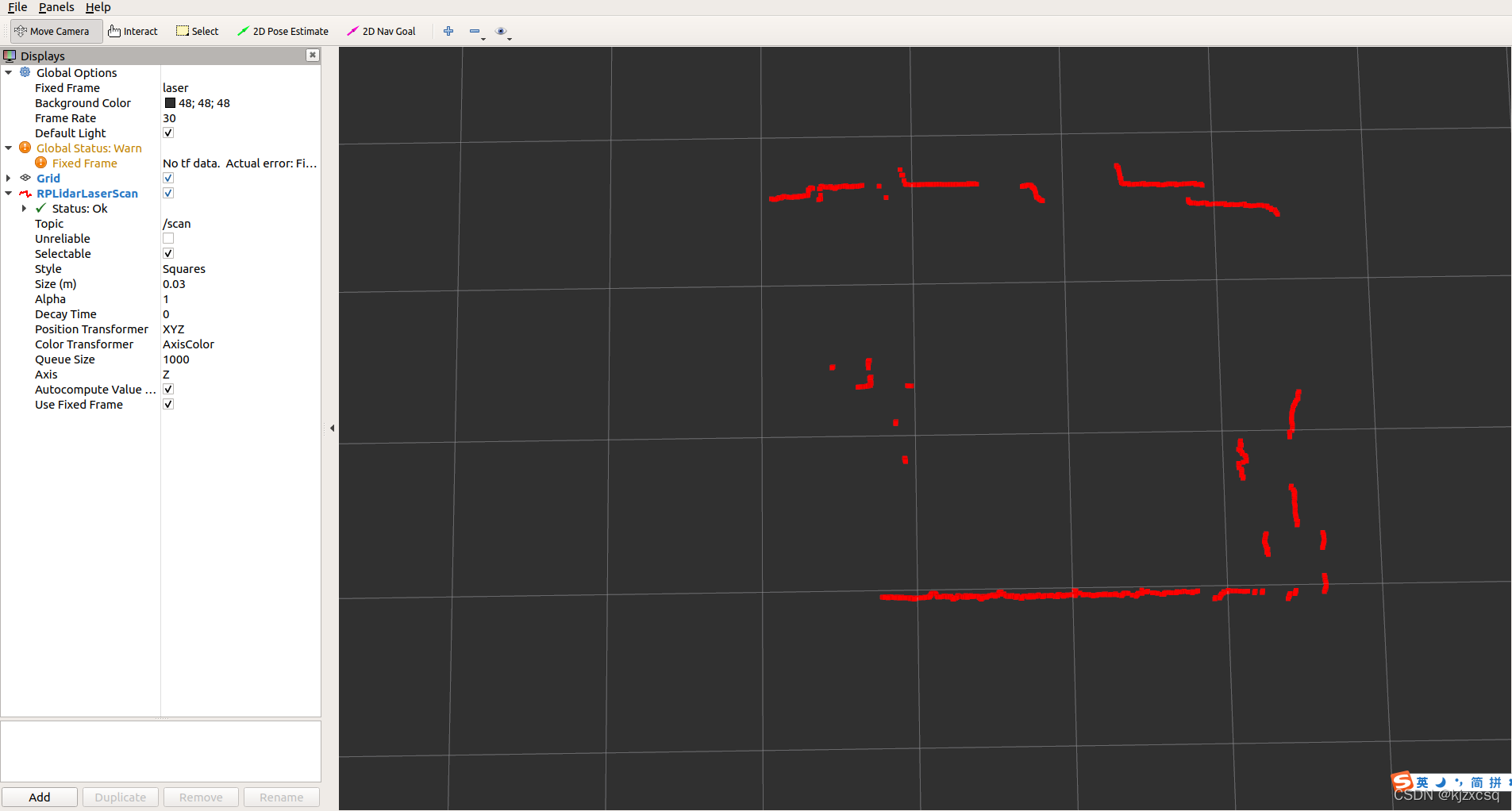
使用的是纯雷达建图指不依靠IMU或者里程计信息,只使用雷达的深度点云进行建图
本文目的本文主要记录调试运行demo中cartographer_paper_deutsches_museum.bag中代码的流程,不具体分析每个函数的功能而是理清调用关系.首先cartographer ros入口1.node_main.cc在node_main中, 主要定义了一个Node ...
cartographer学习视频的配套课件!!! Cartographer is a system that provides ...而企业对激光SLAM从业者的要求越来越高,只会调包调参的人找工作越来越难,只有深入理解激光SLAM原理与代码实现,才具有核心竞争力。
Cartographer是一个支持多平台和传感器配置的SLAM的系统。 本文主要讲述在ros2 humble系统上cartographer的安装方法,以及如何配置参数实现自己的ros2 bag包的离线建图。
1.IMU型号是xsens Mti 300的,激光雷达是hokuyo的。 下载驱动包,以及调试在前面博客。 2.安装cartographer程序包 二、文件修改 在cartographer_ros/configuration_files文件夹下新建Imu_hokuyo.lua,Imu_hokuyo....
在cartographer中经常使用的是scan_to_map的方式,通过cartographer自己维护的PoseExtrapolator使用匹配的方式来获得当前帧与地图的匹配值,但是这样的方式在环境经常变的场景下效果会比较差, 而使用landmark可以...
安装Ubuntu20.04+ROS+Cartographer


cartographer论文【英文版】 文章基于自适应多距离扫描调度的制图SLAM优化方法阿卜杜拉赫曼·德维乔托莫 1、莫哈末阿齐兹·阿卜杜勒·拉赫曼 1、莫哈末哈达·穆罕默德·阿里夫 1、海里·扎姆祖里 2 和万·穆赫德·...
详细的cartographer代码流程图,一文把整个思路梳理清楚
针对cartographer 源码添加详细注释说明,以便于更好的理解。
目前不使用IMU,不使用里程计,只使用激光雷达数据。trajectory_builder->AddSensorData函数里,如果不使用坐标系变换,建图效果很好。但是如果使用了坐标系变换,则建图效果很差。这是什么原因呢? trajectory_...
适用于Ubuntu16.04和Ubuntu18.04
究其原因,是因为只用激光雷达且没有比较明显的建筑障碍物的话,cartographer很难计算出一个比较精准的位置和朝向。因此,为了达到一个更好的建图效果,我们使用了robot_localization包,对IMU和里程计的数据进行...

UBUNTU18环境安装适配cartographer教程建图的教程,使用二进制安装的形式,可以跳过源码编译不过的痛苦,这个也是我摸索很久得出的教程。
像gmapping保存地图一样保存cartographer2D构建的栅格地图
Cartographer激光SLAM2D源码分析本文目的首先cartographer ros入口1.node_main.cc2.node.cc3. map_builder_bridge.cc4. map_builder.cccartographer模块1. collated_trajectory_builder 本文目的 本文主要记录调试...
版本为ceres-solver-1.13.0,对应的是ros-melodic的环境,激光--cartographer中使用
本文主要对google的开源SLAM框架 Cartographer 建图过程中的激光雷达对栅格地图的更新模型CastRay进行详细讲解。目前网上对这部分的讲解比较少,只是大致提一下其使用的是 Bresenham快速画直线算法。本质上是没有...
使用Livox Mid-360雷达及其内置IMU实现Cartographer建图与定位。 压缩文件内包含建图和定位对应的launch文件和lua配置文件。
推荐文章
- GPT-ArcGIS数据处理、空间分析、可视化及多案例综合应用
- 在Debian 10上安装MySQL_debian mysql安装-程序员宅基地
- edge 此项内容已下载并添加到 Chrome 中。_一个小扩展,解决Chrome长期以来的大痛点...-程序员宅基地
- vue js 点击按钮为当前获得焦点的输入框输入值_vue获得当前获得焦点的元素-程序员宅基地
- Android 资源文件中@、@android:type、@*、?、@+含义和区别_@android @*android-程序员宅基地
- python中的正则表达式是干嘛的_Python中正则表达式介绍-程序员宅基地
- GeoGeo多线程_geo 多线程-程序员宅基地
- phpstudy的Apache无法启动_phpstudy apache无-程序员宅基地
- 数据泵导出出现ORA-31617错误-程序员宅基地
- java基础巩固-宇宙第一AiYWM:为了维持生计,两年多实验室项目经验之分层总结和其他后端开发好的习惯~整起_java两年经验项目-程序员宅基地